
How Can We Help?
CAN Driver Board – David
I designed a small board to add a CAN transceiver and dual RJ45s to many development boards. Since it is generic, it needs to be wired onto the board. This is easily done with jumpers. It has provisions for:
- Can be used with 3.3V or 5V microprocessors;
- Can use a number of CAN driver chips:
a. ISO1050 – isolated driver, required two power supplies;
b. MCP2551 – basic 5V driver;
c. MCP2562 – split supply driver;
d. TJA1051T/3 – split supply driver. - Allows power to be sourced from the CAN bus;
- Allows power to be supplied to the CAN bus;
- Supports simple or split bus termination.
- Can use through-hole or smd passive components.
- Power to or from the bus
The Manual is at: CAN Driver Board
These are still available, with partial parts from David Harris.
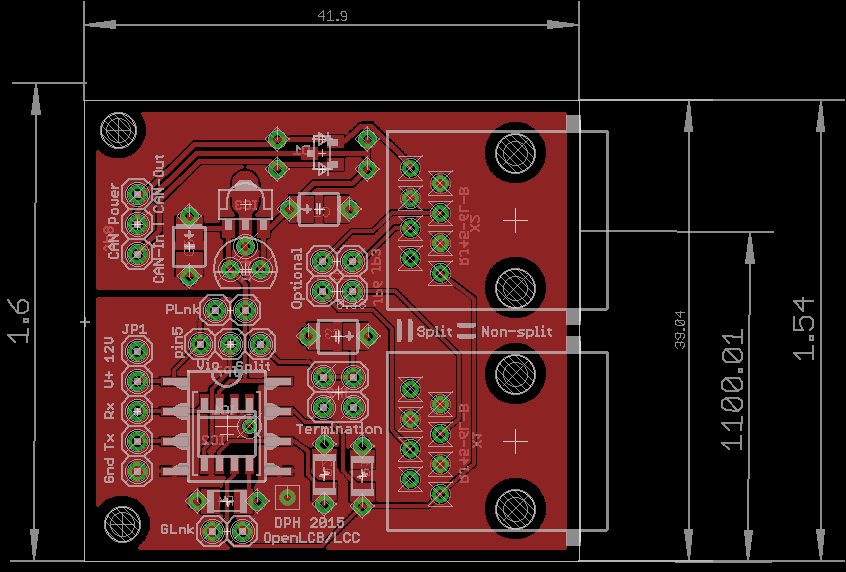
Generated picture of the board. RJ45s on right, with termination selector. Two imbedded transceiver footprints to the left next to the connections to the dev board. Power direction selection and regulator at the top.
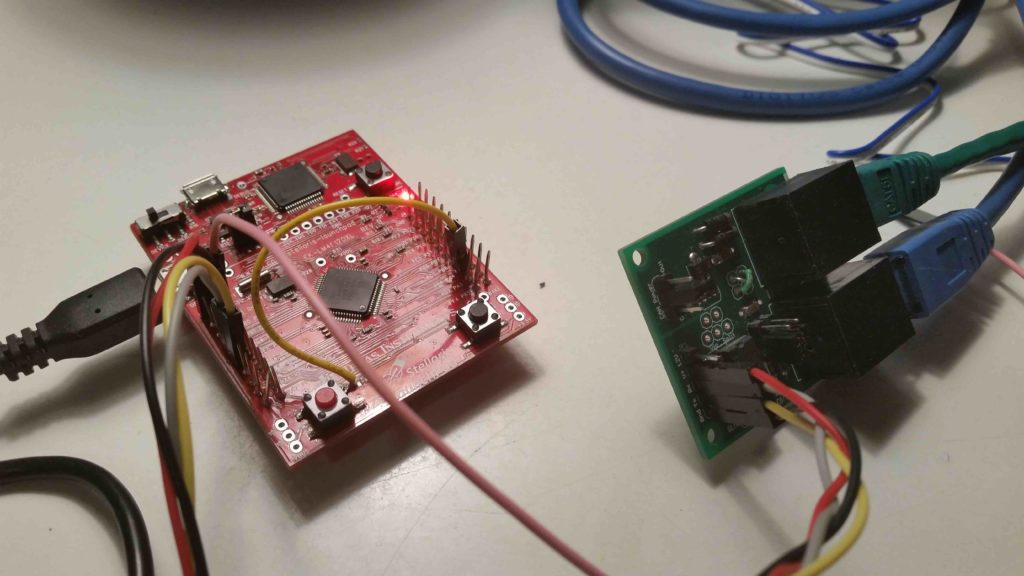
CAN Driver board connected to a Tiva Launchpad